
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
ęįā╔ūįė╔Č╚ÖC(j©®)Ų„╚╦×ķ└²Ż¼ĮķĮBį┌ĻP(gu©Īn)╣Ø(ji©”)┐šķg║═į┌ų▒ĮŪū°ś╦(bi©Īo)┐šķg▀M(j©¼n)ąą▄ē█EęÄ(gu©®)äØĄ─╗∙▒ŠįŁ└ĒĪŻ╚ńłD5-3╦∙╩ŠŻ¼ę¬Ū¾ÖC(j©®)Ų„╚╦Å─A ³c(di©Żn)▀\(y©┤n)äė(d©░ng)ĄĮB ³c(di©Żn)ĪŻÖC(j©®)Ų„╚╦į┌A ³c(di©Żn)Ģr(sh©¬)Ą─ĻP(gu©Īn)╣Ø(ji©”)ĮŪ×ķ”┴=20ĪŃ, ”┬=30ĪŃĪŻ╝┘įO(sh©©)ęč╦Ń│÷ÖC(j©®)Ų„╚╦▀_(d©ó)ĄĮB ³c(di©Żn)Ģr(sh©¬)Ą─ĻP(gu©Īn)╣Ø(ji©”)ĮŪ╩Ū”┴=40ĪŃ,”┬=80ĪŃ,═¼Ģr(sh©¬)ęčų¬ÖC(j©®)Ų„╚╦ā╔éĆ(g©©)ĻP(gu©Īn) ╣Ø(ji©”)▀\(y©┤n)äė(d©░ng)Ą─Z┤¾╦┘┬╩Š∙×ķ10ĪŃ/s ĪŻÖC(j©®)Ų„╚╦Å─A ³c(di©Żn)▀\(y©┤n)äė(d©░ng)ĄĮB ³c(di©Żn)Ą─ę╗ĘNĘĮĘ©╩Ū╩╣╦∙ėąĻP(gu©Īn)╣Ø(ji©”)Č╝ęįŲõZ┤¾ĮŪ╦┘Č╚▀\(y©┤n)äė(d©░ng)Ż¼▀@Š═╩Ūšf(shu©Ł)Ż¼ÖC(j©®)Ų„╚╦Ž┬ĘĮĄ─▀BŚUė├2s ╝┤┐╔═Ļ│╔▀\(y©┤n)äė(d©░ng)Ż¼Č°╚ńłD5-3╦∙╩ŠŻ¼╔ŽĘĮĄ─▀BŚU▀ĆąĶ į┘▀\(y©┤n)äė(d©░ng)3s ĪŻ łD5-3ųą«ŗ│÷┴╦▓┘ū„▒█─®Č╦Ą─▄ē█EŻ¼┐╔ ęŖŲõ┬ĘÅĮ╩Ū▓╗ęÄ(gu©®)ätĄ─Ż¼▓┘ū„▒█─®Č╦ū▀▀^(gu©░)Ą─ŠÓļxę▓╩Ū ▓╗Š∙ä“Ą─ĪŻ
īóÖC(j©®)Ų„╚╦▓┘ū„▒█ā╔éĆ(g©©)ĻP(gu©Īn)╣Ø(ji©”)Ą─▀\(y©┤n)äė(d©░ng)ė├ę╗éĆ(g©©)╣½╣▓ę“ūėū÷Üwę╗╗»╠Ä└ĒŻ¼╩╣Ųõ▀\(y©┤n)äė(d©░ng)ĘČć·▌^ąĪĄ─ĻP(gu©Īn)╣Ø(ji©”)▀\(y©┤n)äė(d©░ng)│╔ ▒╚└²Ąž£p┬²Ż¼▀@śė┐╔╩╣Ą├ā╔éĆ(g©©)ĻP(gu©Īn)╣Ø(ji©”)─▄ē“═¼▓Įķ_╩╝║═ ═¼▓ĮĮY(ji©”)╩°▀\(y©┤n)äė(d©░ng)ĪŻ▀@Ģr(sh©¬)ā╔éĆ(g©©)ĻP(gu©Īn)╣Ø(ji©”)ęį▓╗═¼╦┘Č╚ę╗Ų▀B└m(x©┤)▀\(y©┤n)äė(d©░ng)Ż¼╝┤”┴├┐├ļĖ─ūā4ĪŃ,Č°”┬├┐├ļĖ─ūā10ĪŃĪŻÅ─ łD5-4┐╔ęį┐┤│÷Ż¼Ą├│÷Ą─▄ē█E┼cŪ░├µ▓╗═¼Ż¼įō▀\(y©┤n)äė(d©░ng)▄ē █EĄ─Ė„▓┐Ęų▒╚ęįŪ░Ė³╝ėŠ∙║ŌŻ¼Ą½╩Ū╦∙Ą├┬ĘÅĮ╚į╚╗╩Ū▓╗ęÄ(gu©®)ätĄ─ĪŻ▀@ā╔éĆ(g©©)└²ūėČ╝╩Ūį┌ĻP(gu©Īn)╣Ø(ji©”)┐šķgųą ▀M(j©¼n)ąąęÄ(gu©®)äØĄ─Ż¼╦∙ąĶĄ─ėŗ(j©¼)╦ŃāH╩Ū▀\(y©┤n)äė(d©░ng)ĮK³c(di©Żn)Ą─ĻP(gu©Īn)╣Ø(ji©”)┴┐Ż¼Č°Ą┌Č■éĆ(g©©)└²ūėųą▀Ć▀M(j©¼n)ąą┴╦ĻP(gu©Īn)╣Ø(ji©”)╦┘┬╩Ą─Üwę╗ ╗»╠Ä└ĒĪŻ
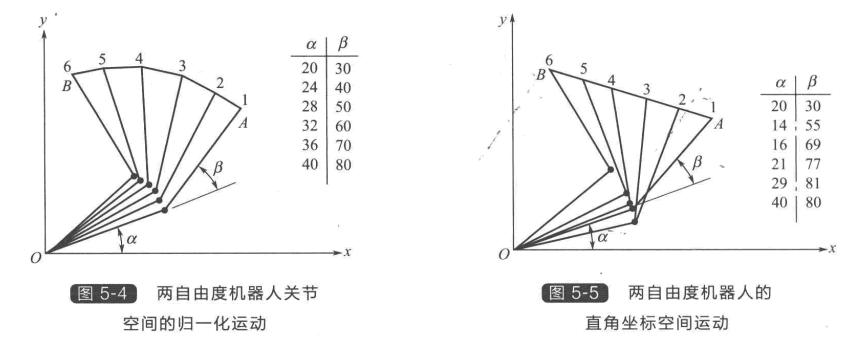
¼F(xi©żn)į┌╝┘įO(sh©©)ŽŻ═¹ÖC(j©®)Ų„╚╦Ą──®Č╦ł╠(zh©¬)ąąŲ„čžA ³c(di©Żn) ĄĮB ³c(di©Żn)ų«ķgĄ─ę╗Ślęčų¬ų▒ŠĆ┬ĘÅĮ▀\(y©┤n)äė(d©░ng)ĪŻZ║å(ji©Żn) å╬Ą─ĮŌøQĘĮĘ©╩ŪŽ╚į┌A ³c(di©Żn) ║═B ³c(di©Żn)ų«ķg«ŗę╗ų▒ŠĆŻ¼į┘īó▀@ŚlŠĆĄ╚Ęų×ķÄū▓┐ĘųŻ¼└²╚ńĘų×ķ5 Ę▌Ż¼╚╗║¾╚ńłD5-5╦∙╩Šėŗ(j©¼)╦Ń│÷Ė„³c(di©Żn)╦∙ąĶꬥ─”┴║═”┬ųĄŻ¼▀@ę╗▀^(gu©░)│╠ĘQ×ķį┌A ³c(di©Żn) ║═B ³c(di©Żn)ų«ķg▓Õ ųĄĪŻ┐╔ęį┐┤│÷Ż¼▀@Ģr(sh©¬)┬ĘÅĮ╩Ūę╗Ślų▒ŠĆŻ¼Č°ĻP(gu©Īn)╣Ø(ji©”)ĮŪ▓óĘŪŠ∙ä“ūā╗»ĪŻļm╚╗Ą├ĄĮĄ─▀\(y©┤n)äė(d©░ng)╩Ūę╗Ślęčų¬ Ą─ų▒ŠĆ▄ē█EŻ¼Ą½ąĶę¬ėŗ(j©¼)╦Ńų▒ŠĆ╔Ž├┐³c(di©Żn)Ą─ĻP(gu©Īn)╣Ø(ji©”)┴┐ĪŻ’@╚╗Ż¼╚ń╣¹┬ĘÅĮĘųĖŅĄ─▓┐Ęų╠½╔┘Ż¼īó▓╗─▄▒Ż ūCÖC(j©®)Ų„╚╦į┌├┐ę╗Č╬ā╚(n©©i)ć└(y©ón)Ė±Ąžčžų▒ŠĆ▀\(y©┤n)äė(d©░ng)ĪŻ×ķ½@Ą├Ė³║├Ą─čžčŁŠ½Č╚Ż¼Š═ąĶę¬ī”(du©¼)┬ĘÅĮ▀M(j©¼n)ąąĖ³ČÓĄ─ ĘųĖŅŻ¼ę▓Š═ąĶę¬ėŗ(j©¼)╦ŃĖ³ČÓĄ─ĻP(gu©Īn)╣Ø(ji©”)³c(di©Żn)ĪŻė╔ė┌ÖC(j©®)Ų„╚╦▄ē█EĄ─╦∙ėą▀\(y©┤n)äė(d©░ng)Č╬Č╝╩Ū╗∙ė┌ų▒ĮŪū°ś╦(bi©Īo)▀M(j©¼n)ąąėŗ(j©¼) ╦ŃĄ─Ż¼ę“┤╦╦³╩Ūų▒ĮŪū°ś╦(bi©Īo)┐šķgĄ─▄ē█EĪŻ
į┌Ū░├µĄ─└²ūėųąŠ∙╝┘įO(sh©©)ÖC(j©®)Ų„╚╦Ą─“ī(q©▒)äė(d©░ng)čbų├─▄ē“╠ß╣®ūŃē“┤¾Ą─╣”┬╩üĒ(l©ói)ØMūŃĻP(gu©Īn)╣Ø(ji©”)╦∙ąĶĄ─╝ė╦┘ ║═£p╦┘Ż¼╚ńŪ░├µ╝┘įO(sh©©)▓┘ū„▒█į┌┬ĘÅĮDę╗Č╬▀\(y©┤n)äė(d©░ng)Ą─ę╗ķ_╩╝Š═┐╔┴ó┐╠╝ė╦┘ĄĮ╦∙ąĶĄ─Ų┌═¹╦┘Č╚ĪŻ╚ń ╣¹▀@ę╗³c(di©Żn)▓╗│╔┴óŻ¼ÖC(j©®)Ų„╚╦╦∙čžčŁĄ─īó╩Ūę╗Śl▓╗═¼ė┌Ū░├µ╦∙įO(sh©©)ŽļĄ─▄ē█EŻ¼╝┤į┌╝ė╦┘ĄĮŲ┌═¹╦┘Č╚ ų«Ū░Ą─▄ē█Eīó╔į╔į┬õ║¾ė┌įO(sh©©)ŽļĄ─▄ē█EĪŻ×ķ┴╦Ė─▀M(j©¼n)▀@ę╗ĀŅørŻ¼┐╔ī”(du©¼)┬ĘÅĮ▀M(j©¼n)ąą▓╗═¼ĘĮĘ©Ą─ĘųČ╬Ż¼ ╝┤▓┘ū„▒█ķ_╩╝╝ė╦┘▀\(y©┤n)äė(d©░ng)Ģr(sh©¬)Ą─┬ĘÅĮĘųČ╬▌^ąĪŻ¼ļS║¾╩╣Ųõęį║ŃČ©╦┘Č╚▀\(y©┤n)äė(d©░ng)Ż¼Č°į┌ĮėĮ³ B ³c(di©Żn)Ģr(sh©¬)į┘ į┌▌^ąĪĄ─ĘųČ╬╔Ž£p╦┘Ż¼╚ńłD5-6╦∙╩ŠĪŻ«ö(d©Īng)╚╗ī”(du©¼)ė┌┬ĘÅĮ╔ŽĄ─├┐ę╗³c(di©Żn)╚įĒÜŪ¾ĮŌÖC(j©®)Ų„╚╦Ą──µ▀\(y©┤n)äė(d©░ng)īW(xu©”) ĘĮ│╠Ż¼▀@┼cŪ░├µÄūĘNŪķørŅÉ╦ŲĪŻ╚ńį┌įō└²ųąŻ¼▓╗╩Ūīóų▒ŠĆČ╬AB Ą╚ĘųŻ¼Č°╩Ūį┌ķ_╩╝Ģr(sh©¬)╗∙ė┌ĘĮ│╠(172)at² ▀M(j©¼n)ąąäØĘųŻ¼ŪęĄĮŠ▀ĄĮ▀_(d©ó)╦∙ąĶꬥ─▀\(y©┤n)äė(d©░ng) ╦┘Č╚Ģr(sh©¬)×ķų╣Ż¼─®Č╦▀\(y©┤n)äė(d©░ng)ätę└ō■(j©┤)£p╦┘▀^(gu©░)│╠ŅÉ╦ŲĄž▀M(j©¼n)ąą äØĘųĪŻ
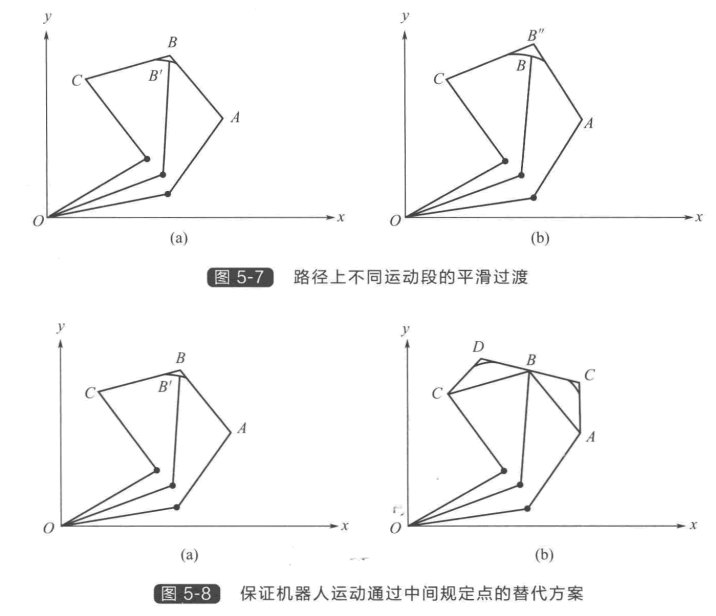
▀Ćėąę╗ĘNŪķør╩Ū▄ē█EęÄ(gu©®)äØĄ─┬ĘÅĮ▓óĘŪų▒ŠĆŻ¼Č° ╩Ū─│éĆ(g©©)Ų┌═¹┬ĘÅĮ(└²╚ńČ■┤╬Ū·ŠĆ),▀@Ģr(sh©¬)ąĶę¬╗∙ė┌ Ų┌═¹┬ĘÅĮėŗ(j©¼)╦Ń│÷├┐ę╗Č╬Ą─ū°ś╦(bi©Īo)Ż¼▓ó▀M(j©¼n)Č°ėŗ(j©¼)╦ŃŽÓæ¬(y©®ng)Ą─ ĻP(gu©Īn)╣Ø(ji©”)┴┐▓┼─▄īŹ(sh©¬)¼F(xi©żn)čžčŁŲ┌═¹┬ĘÅĮ▀\(y©┤n)äė(d©░ng)ĪŻų┴┤╦ų╗┐╝æ]┴╦ ÖC(j©®)Ų„╚╦į┌ A ĪóB ā╔³c(di©Żn)ķgĄ─▀\(y©┤n)äė(d©░ng)Ż¼Č°į┌ČÓöĄ(sh©┤)ŪķørŽ┬Ż¼ ┐╔─▄ę¬Ū¾ÖC(j©®)Ų„╚╦Ēśą“═©▀^(gu©░)įSČÓ³c(di©Żn)ĪŻŽ┬├µ▀M(j©¼n)ę╗▓Įėæšō ČÓ³c(di©Żn)ķgĄ─▄ē█EęÄ(gu©®)äØŻ¼▓óZĮKīŹ(sh©¬)¼F(xi©żn)▀B└m(x©┤)▀\(y©┤n)äė(d©░ng)ĪŻ łD5-6Š▀ėą╝ė╦┘║═£p╦┘Č╬Ą─▄ē█EęÄ(gu©®)äØ ╚ńłD5-7╦∙╩ŠŻ¼╝┘įO(sh©©)ÖC(j©®)Ų„╚╦Å─A ³c(di©Żn)Įø(j©®ng)▀^(gu©░)B ³c(di©Żn)▀\(y©┤n) äė(d©░ng)ĄĮC ³c(di©Żn)ĪŻę╗ĘNĘĮĘ©╩ŪÅ─A Ž“B Ž╚╝ė╦┘Ż¼į┘ä“╦┘Ż¼ĮėĮ³B Ģr(sh©¬)£p╦┘▓óį┌ĄĮ▀_(d©ó)B Ģr(sh©¬)═Żų╣Ż¼╚╗║¾ ė╔ B ĄĮC ųžÅ═(f©┤)▀@ę╗éĆ(g©©)▀^(gu©░)│╠ĪŻ▀@ę╗═Żę╗ū▀Ą─▓╗ŲĮĘĆ(w©¦n)▀\(y©┤n)äė(d©░ng)░³║¼┴╦▓╗▒žę¬Ą─═Żų╣äė(d©░ng)ū„ĪŻę╗ĘN┐╔ąą ĘĮĘ©╩ŪīóB ³c(di©Żn)ā╔▀ģĄ─▀\(y©┤n)äė(d©░ng)▀M(j©¼n)ąąŲĮ╗¼▀^(gu©░)Č╔ĪŻÖC(j©®)Ų„╚╦Ž╚Ąų▀_(d©ó)B ³c(di©Żn)(╚ń╣¹▒žę¬Ą─įÆ┐╔ęį£p╦┘),╚╗ ║¾čžų°ŲĮ╗¼▀^(gu©░)Č╔Ą─┬ĘÅĮųžą┬╝ė╦┘Ż¼ZĮKĄų▀_(d©ó)▓ó═Żį┌C ³c(di©Żn)ĪŻŲĮ╗¼▀^(gu©░)Č╔Ą─┬ĘÅĮ╩╣ÖC(j©®)Ų„╚╦Ą─▀\(y©┤n)äė(d©░ng) Ė³╝ėŲĮĘĆ(w©¦n)Ż¼ĮĄĄ═┴╦ÖC(j©®)Ų„╚╦Ą─æ¬(y©®ng)┴”╦«ŲĮŻ¼▓óŪę£p╔┘┴╦─▄┴┐Ž¹║─ĪŻ╚ń╣¹ÖC(j©®)Ų„╚╦Ą─▀\(y©┤n)äė(d©░ng)ė╔įSČÓČ╬ĮM │╔Ż¼╦∙ėąĄ─ųąķg▀\(y©┤n)äė(d©░ng)Č╬Č╝┐╔ęį▓╔ė├▀^(gu©░)Č╔Ą─ĘĮ╩ĮŲĮ╗¼▀BĮėį┌ę╗ŲĪŻĄ½ąĶę¬ūóęŌė╔ė┌▓╔ė├┴╦ŲĮ╗¼ ▀^(gu©░)Č╔Ū·ŠĆŻ¼ÖC(j©®)Ų„╚╦Įø(j©®ng)▀^(gu©░)Ą─┐╔─▄▓╗╩ŪįŁüĒ(l©ói)Ą─B ³c(di©Żn)Č°╩ŪB'³c(di©Żn)[╚ńłD5-7(a) ╦∙╩Š]ĪŻ╚ń╣¹ę¬Ū¾ÖC(j©®) Ų„╚╦£╩(zh©│n)┤_Įø(j©®ng)▀^(gu©░)B ³c(di©Żn)Ż¼┐╔╩┬Ž╚įO(sh©©)Č©ę╗éĆ(g©©)▓╗═¼Ą─B"³c(di©Żn)Ż¼╩╣Ą├ŲĮ╗¼▀^(gu©░)Č╔Ū·ŠĆš²║├Įø(j©®ng)▀^(gu©░)B ³c(di©Żn)[╚ńłD 5-7(b) ╦∙╩Š]ĪŻ┴Ēę╗ĘNĘĮĘ©╚ńłD5-8╦∙╩ŠŻ¼į┌B ³c(di©Żn)Ū░║¾Ė„╝ė▀^(gu©░)Č╔³c(di©Żn)D ║═E, ╩╣ Ą├B ³c(di©Żn)┬õį┌ DE ▀BŠĆ╔ŽŻ¼┤_▒ŻÖC(j©®)Ų„╚╦─▄ē“Įø(j©®ng)▀^(gu©░) B ³c(di©Żn) ĪŻ
 |
| ÖC(j©®)Ų„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖC(j©®)Ų„╚╦ ųvĮŌÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ╔╠ė├ÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äš(w©┤)ÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ š╣ÅdÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖC(j©®)Ų„╚╦ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ |


