
╚╦ą╬ÖCŲ„╚╦┤·▒Ēų°ę╗éĆĄ─G┐Ų╝╝░lš╣╦«ŲĮĪŻ╚╦ą╬ÖCŲ„╚╦Ż¼ėųĘQĘ┬╚╦ÖCŲ„╚╦Ż¼╔µ╝░ ┐žųŲĪóęÄäØĪóÖCļŖę╗¾w╗»╝╝ągĪó╚½ĘĮ╬╗Ą─ AI Ėąų¬╝╝ągŻ¼ęŲäė─▄┴”║═╣żū„ĘČć·Ż¼╚╦ÖCĮ╗╗ź Ą╚Ż¼╩Ūę╗éĆĄ─G┐Ų╝╝░lš╣╦«ŲĮĄ─ĮK¾w¼FĪŻ
ć°┐Ų┤¾čą░lĄ─Ī░Ž╚ąąš▀Ī▒ÖCŲ„╚╦┐╔ęį═Ļ│╔ņo æB║═äėæB▓Įąąäėū„Ż╗╣■╣ż┤¾═Ų│÷Ą─Ī░HIT-IIIĪ▒ÖCŲ„╚╦─▄═Ļ│╔╔ŽĪóŽ┬ą▒Ų┬Ą╚äėū„Ż╗ŪÕ╚A┤¾īWķ_ ░lĄ─Ī░THBIP-IIĪ▒╔ĒG 0.75mŻ¼¾wųž 18 kgŻ¼Š▀ėą 24 éĆūįė╔Č╚Ż╗šŃĮŁ┤¾īWčą░l│÷Ģ■┤“Ų╣┼ęŪ“Ą─ Ī░╬“Ī▒ĪóĪ░┐šĪ▒╚╦ą╬ÖCŲ„╚╦Ż╗▒▒└Ē╣ż═Ų│÷Ą─Ī░ģR═»Ī▒ÖCŲ„╚╦┐╔═Ļ│╔╦żĄ╣Ų┴óŻ¼Ī░╦żØLū▀┼└Ī▒Ą╚äėū„ĪŻ į┌«aśILė“Ż¼╔Ņ█┌ā×▒ž▀x═Ų│÷Ą─Ī░WalkerĪ▒ÖCŲ„╚╦─▄═Ļ│╔╔ŽĪóŽ┬┼_ļAĄ╚äėū„ĪŻ
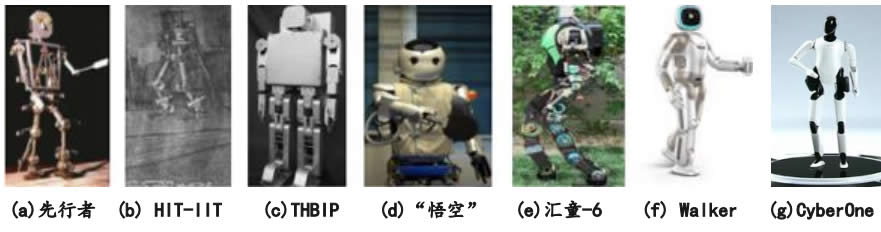
ąĪ├ūė┌ 2022 ─Ļ 8 į┬╣½▓╝┐Ņ╚½│▀┤ń╚╦ą╬ÖCŲ„╚╦ CyberOneŻ©ĶF┤¾Ż®ĪŻ╔²J║¾Ą─▀\äė┐žųŲ ╦ŃĘ©ų¦┼õ▀@ÖCŲ„╚╦╚½╔Ē 13 éĆĻP╣Ø║═ 21 éĆūįė╔Č╚Ż¼īŹ¼FļpūŃ▀\äėū╦æBŲĮ║ŌŻ╗ļŖÖCąį─▄į÷ÅŖ 10 ▒ČŻ¼¾yĻP╣Øų„ę¬ļŖÖCĄ─äė┴”┼żŠžĘÕųĄ┐╔▀_ 300NmŻ¼ĘÕųĄ┼żŠž├▄Č╚ 96Nm/kgĪŻ
ŁhŠ│Ėąų¬ĘĮ├µŻ¼ūį蹥─ Mi-Sense ╔ŅČ╚ęĢėX─ŻĮM+AI ╦ŃĘ©Ä═ų· CyberOne īŹ¼Fī”šµīŹ╩└ĮńĄ─╚²ŠS╠ōöMųžĮ©ĪŻŪķŠwĖąų¬ ╔ŽŻ¼CyberOne ┤Ņ▌dūįčą MiAI ŁhŠ│šZ┴xūRäeę²Ūµ║═ MiAI šZę¶ŪķŠwūRäeę²ŪµŻ¼─▄ē“īŹ¼F 85 ĘNŁhŠ│ę¶ūRäe║═ 6 ┤¾ŅÉ 45 ĘN╚╦ŅÉŪķŠwūRäeĪŻ
╚╦ą╬ÖCŲ„╚╦īóī”╔ńĢ■ūāĖ’┼c░lš╣«a╔·ųžę¬ė░Ēæū„ė├ĪŻ
╚╦ą╬ÖCŲ„╚╦Š▀ėą┼c╚╦ŅÉŽÓ╦ŲĄ─▄| Ė╔ĮYśŗ┼c▀\äė─▄┴”Ż¼╩╣ŲõŠ▀ėąŁhŠ│▀mæ¬─▄┴”Ż¼▌^┤¾╣żū„ĘČć·Ż¼žSĖ╗Ą─äėū„ą╬æBŻ¼Ė³G ─▄┴┐└¹ė├ą¦┬╩║═│÷╔½Ą─╚╦ÖC╗źäė─▄┴”Ż¼┐╔īó╚╦ŅÉÅ─Ą═J║═G╬ŻąąśIųąĮŌĘ┼│÷üĒŻ¼╩╣╚╦ŅÉ─▄ ē“īŻūóė┌GJųŪ╗█╗ŅäėŻ¼Å─Č°╠ß╔²╔·«a┴”╦«ŲĮ║═╣żū„ą¦┬╩ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



